Lastgang
Ansatz
Um die potentiellen Vorteile von optimiertem Lademanagement für Fahrzeugflotten bewerten zu können wird zu aller erst eine Referenz benötigt, dafür kann die Ladesimulation einer Fahrzeugflotte mit und ohne Infrastrukturbeschränkungen durchgeführt werden. Sofern Monitoring der Fahrzeugflotte erfolgt kann mit dieser Referenzsimulation auch Modellverifikation und -kalibrierung durchgeführt werden.
Um den Nutzen optimierter Lade‑ und Einsatzstrategien bewerten zu können, benötigt man zunächst eine Referenz, also ein nachvollziehbares, deterministisches Basisszenario. Eine solche Referenz kann über eine Ladesimulation der Fahrzeugflotte erzeugt werden.
Diese Ladesimulation ermöglichen:
- Vergleichbarkeit zwischen Szenarien und Ladeverfahren
- Modellverifikation und kalibrierung, wenn Monitoring-Daten vorhanden sind
Die Simulation bildet damit die Grundlage für jede spätere Optimierung, da sie zeigt, wie sich eine Flotte ohne Optimierungsmaßnahmen verhält.
Funktionsweise
Die Ladesimulation im FreeE‑Bus-Projekt basiert auf zwei Grundprinzipien:
Wie lädt das einzelne Fahrzeug? - definiert durch das Ladeverhalten: Greedy (volle Leistung) oder Lazy (minimal benötigte Leistung)
Wie reagiert die Infrastruktur auf Ladeanforderungen? - entweder ignoriert (ohne Infrastrukturbeschränkung) - oder berücksichtigt (mit Lastmanagement: FCFS, Assigned, LoadBalancing)
Die Simulation läuft eventbasiert und reaktiv: Zeitliche Ereignisse wie Ankunft- und Abfahrt am Ladedepot, Änderung der Ladeleistung etc. lösen jeweils Berechnungen aus. Die Infrastruktur (sofern berücksichtig), agiert nicht vorausschauend, sondern reagiert lediglich auf die aktuelle Ereignisse der Fahrzeugflotte. Eine kleine Außnahme besteht im Modus “Lazy” da für die Berechnung der minimale benötigen Ladeleistung im Ladeintervall die nächste Abfahrtszeit des Fahrzeugs berücksichtigt werden muss.
Im FreeE-Bus Projekt wurde grob zwischen zwei Klassen von Ladesimulationen unterschieden: – einmal ohne und einmal mit technischem Infrastruktur‑Limit.
Grundsätzlich sollte jedoch die Ladesimulation mit technischem Infrastrukturbeschränkung als Referenz verwendet werden, je nach Planungs- bzw. Umsetzungsstand für die elektrifizierung der Fahrzeugflotte, Ladeinfrastruktur und des Fahrplans, biete sich die Ladesimulation ohne Infrastrukturbeschränkung als Startpunkt für Analysen an.
Ladesimulation ohne Infrastrukturbeschränkung
In dieser einfachsten Simulationsebene wird ausschließlich das Verhalten der Fahrzeuge betrachtet. Es existieren keine Infrastrukturrestriktionen, d. h.:
- alle Fahrzeuges können gleichzeitig laden
- Ladeleistung ist nur durch die Spezifikation des Fahrzeuges beschränkt
- Ladepunkte müssen nicht zugewiesen werden
Diese Simulation wird für zwei zentrale Zwecke genutzt:
1. Benchmarking (“Worst‑Case‑Ladeprofil”) Sie zeigt, wie hoch der Leistungsbedarf einer Flotte wäre, wenn alle Fahrzeuge immer sofort und so schnell wie möglich laden.
2. Planung & Diskussion Die Simulation hilft aufzuzeigen:
- wie viel Energie die Flotte pro Tag benötigt
- welche Fahrzeugeinsätze selbst bei überdimensionierter Ladeinfrastruktur kritische Ladestände/Reichweiten erreichen
- wie viel Ladezeit theoretisch verfügbar wäre
| Algorithmus | Verhalten | Beschreibung |
|---|---|---|
| Vehicle_Greedy | volle Fahrzeug-Ladeleistung | Fahrzeuge laden immer maximal schnell, keine Prüfung auf Infrastuktur-Limits. |
| Vehicle_Lazy | minimale benötigte Ladeleistung | Fahrzeuge laden nur so schnell, wie nötig ist, um die nächste Fahrt vollgeladen zu beginnen. |
| Vehicle_Greedy_VH2CP | volle Fahrzeug-Ladeleistung | Wie Vehicle_Greedy, aber mit vorgegebener Ladepunktzuweisung (z. B. Monitoring‑basiert). |
Einsatzszenarien
- Referenzsimulationen
- Szenarien ohne vollständige Infrastukturdaten
- Analysen von Aufenthaltszeiten und Pufferständen
- Abschätzung von Energiebedarf und Reichweiten
Beispiel Analyse
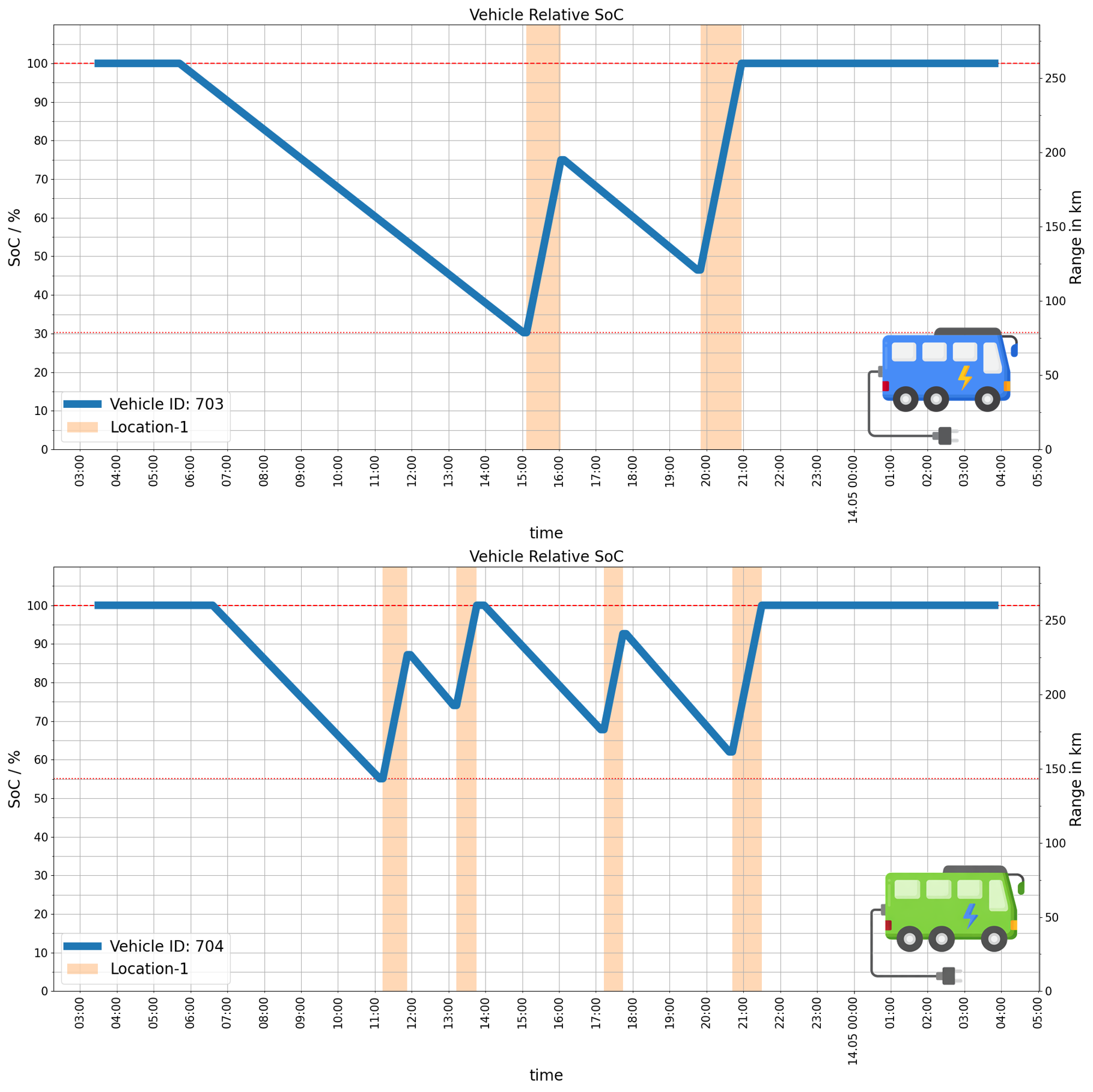
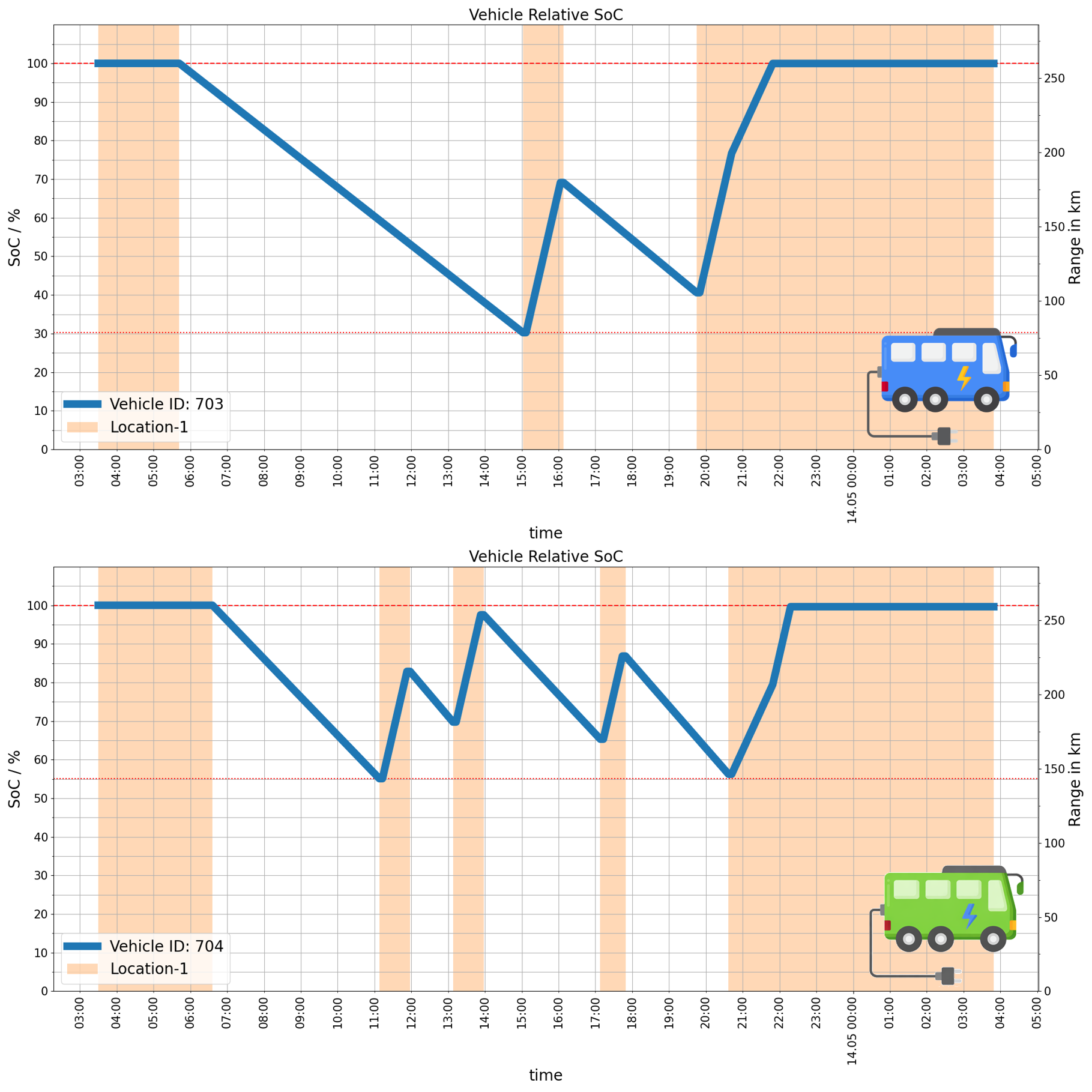
In dieser Beispielhaften Analyse, werden zwei Fahrzeuge (blau und grün) an einem Ladeort mit dem Vehicle-Greedy-Algorithmus simuliert.
In der folgenden Abbildung ist an Hand des Batterieladestands (State of Charge, SoC) zu sehen, dass beide Fahrzeuge ihre Fahrten problemlos meistern und rechtzeitig geladen werden können.
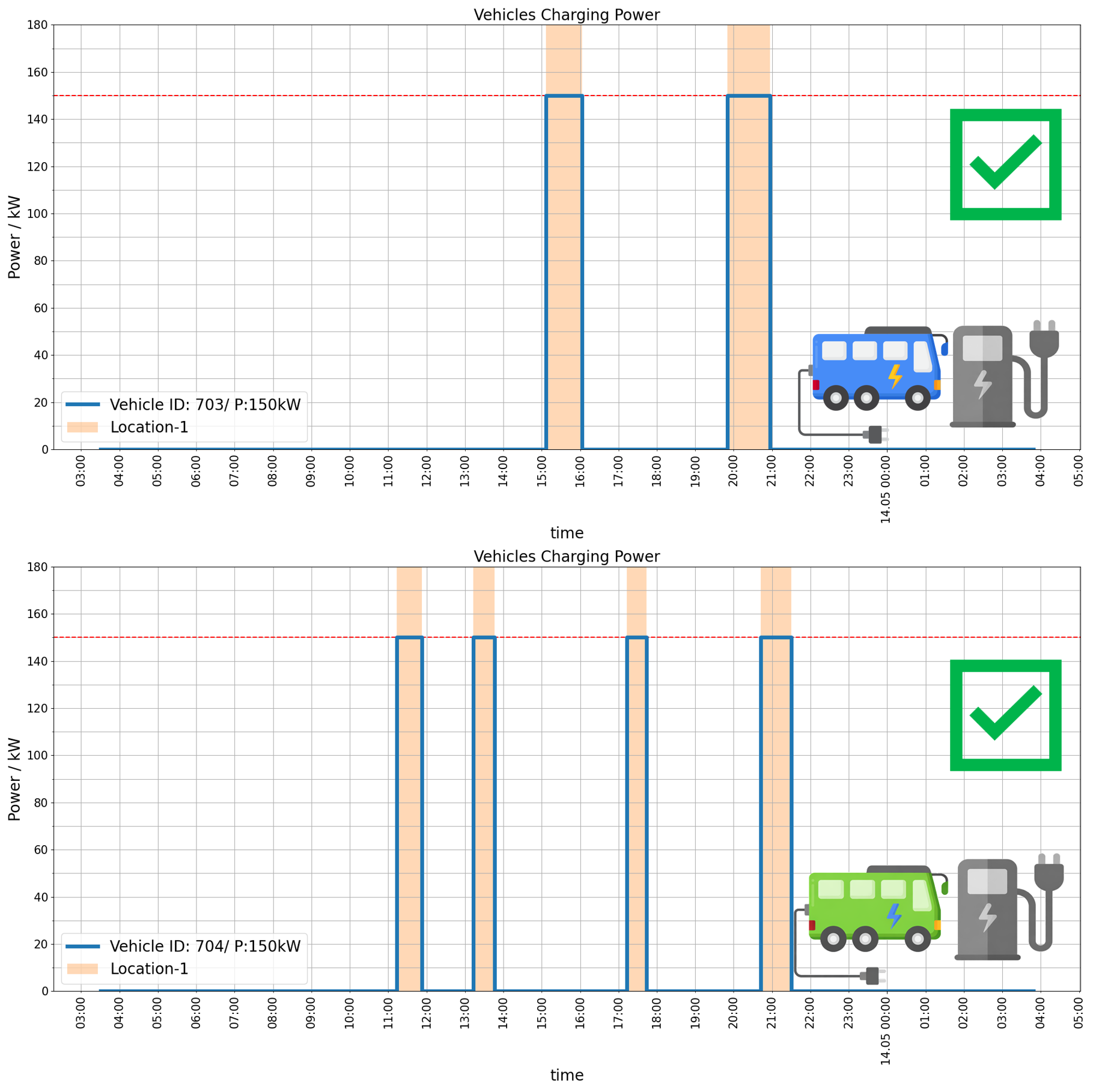
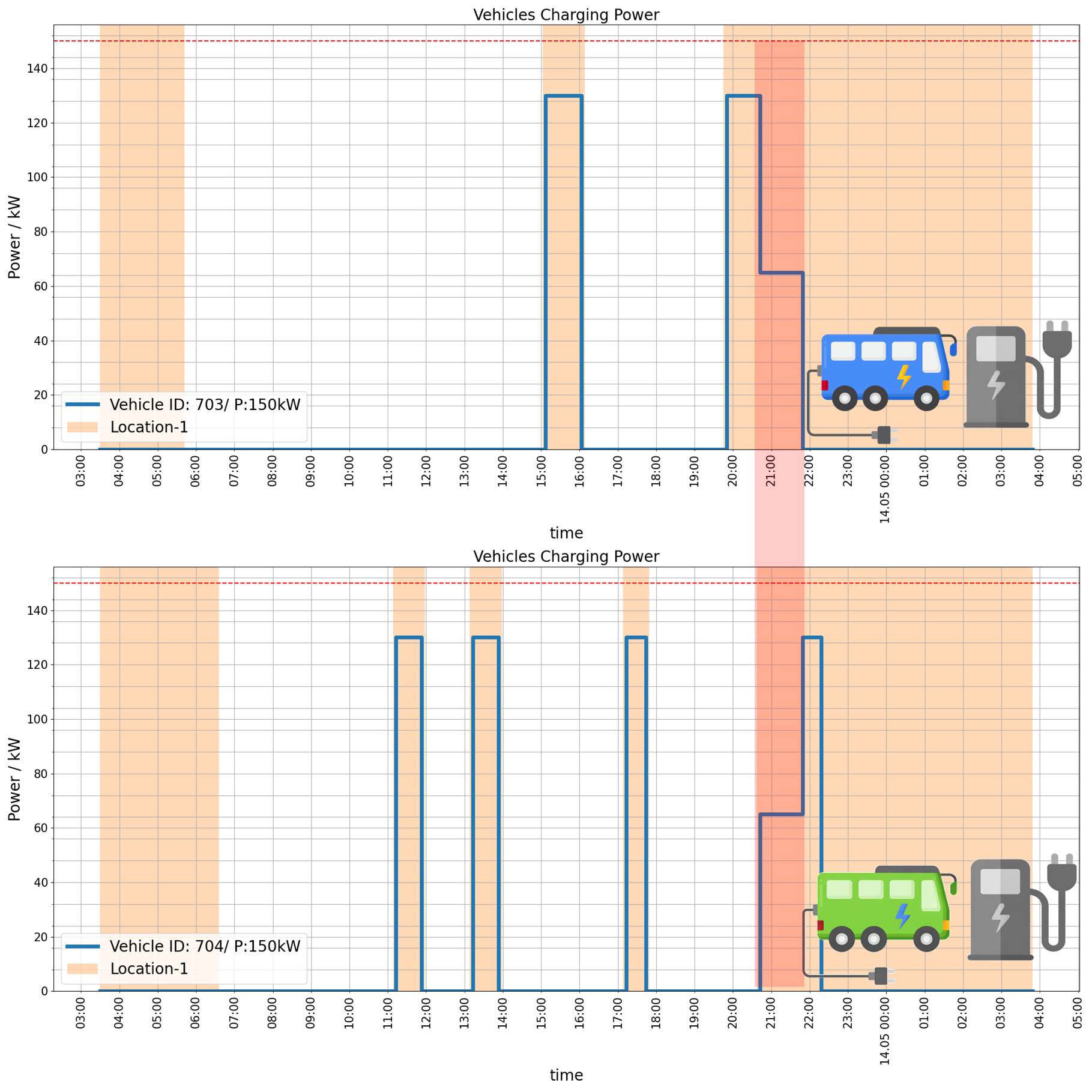
Die max. Ladeleistung je Fahrzeug beträgt 150 kW, welche in den Ladeintervallen auch vollständig bezogen werden.
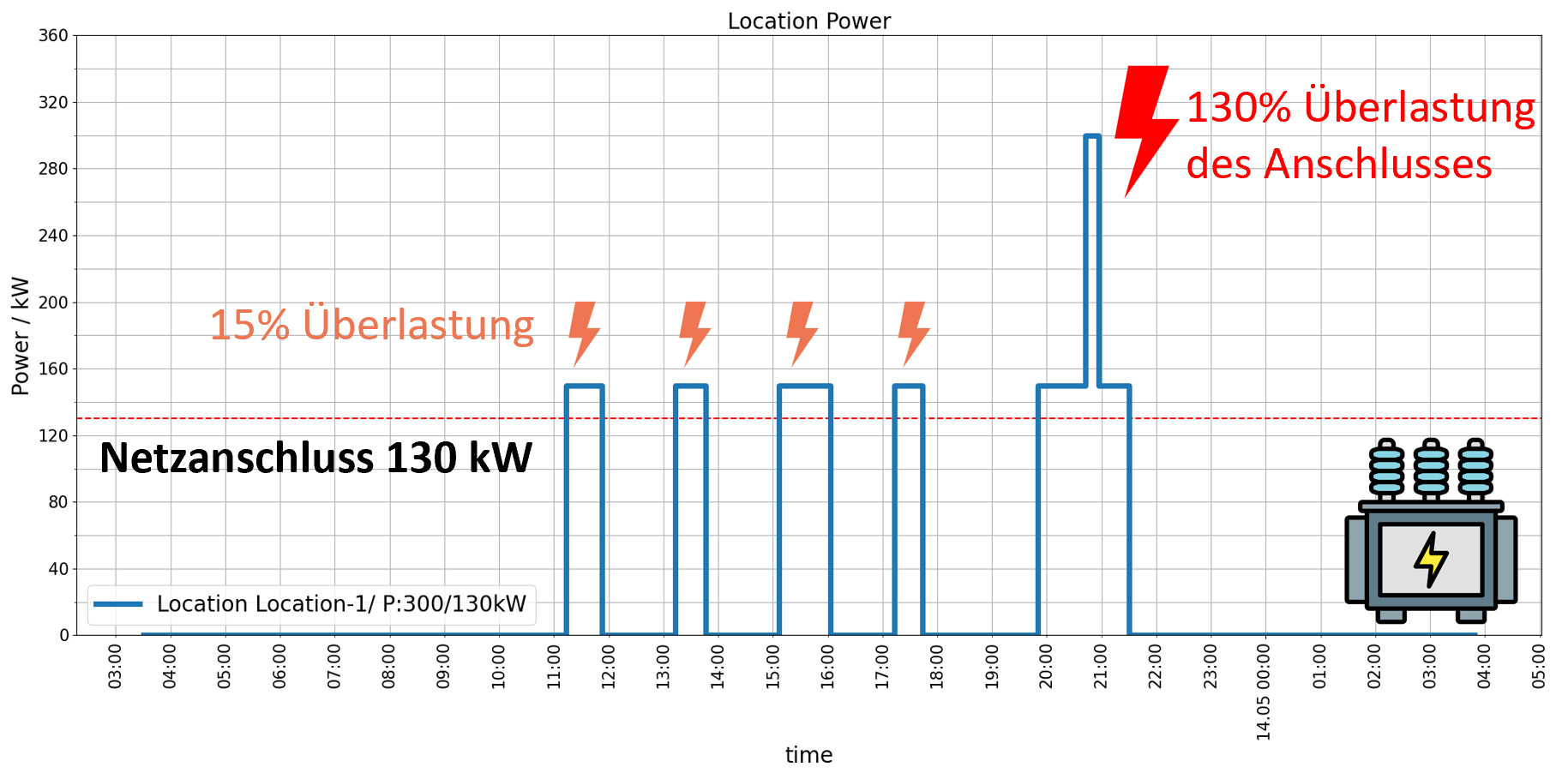
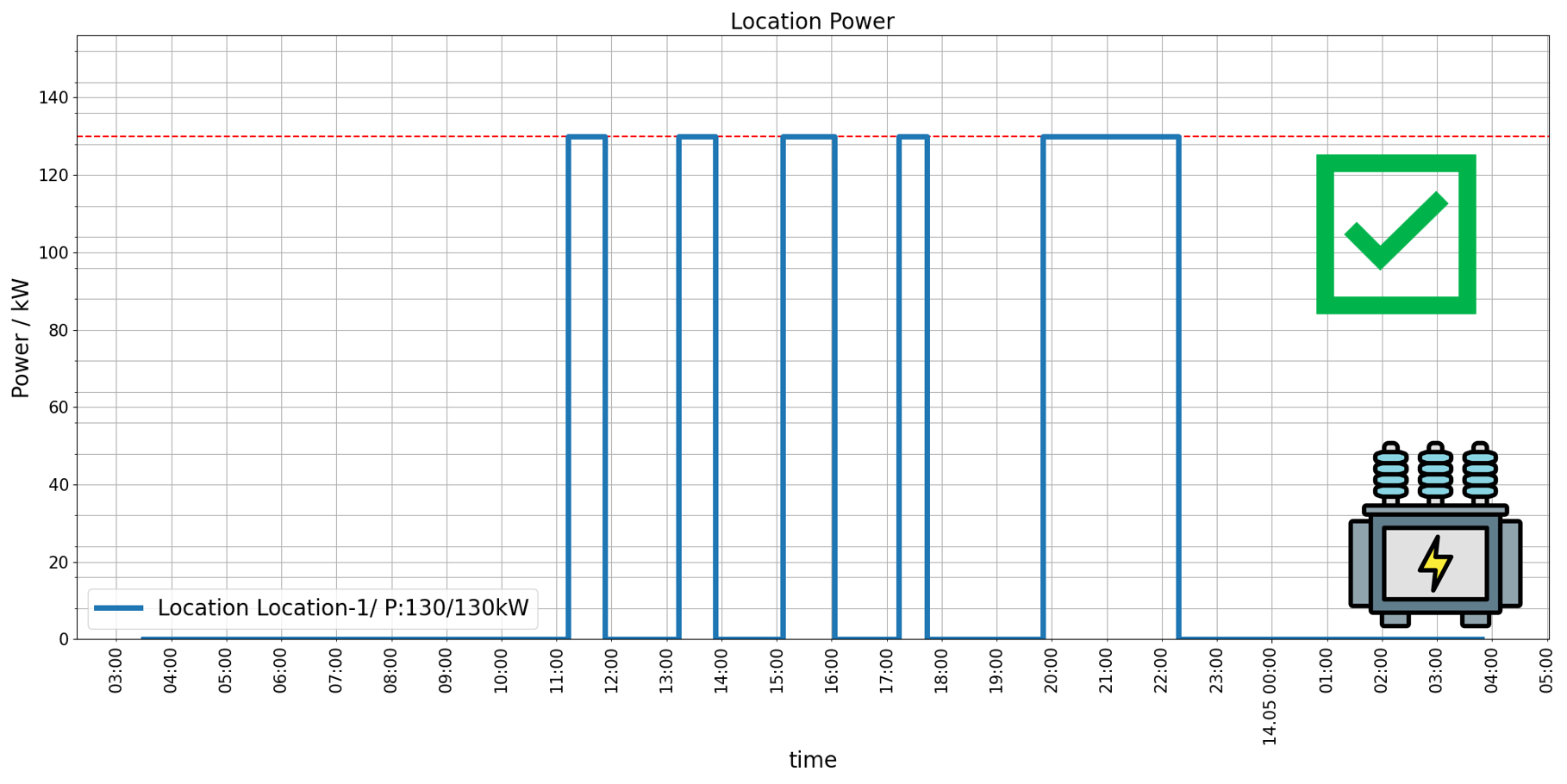
Ein Blick auf den aggregierten Lastgang am Ladeort zeigt jedoch, dass durch das ignorieren der Ladeinfrastruktur-Limits die zulässige Last (max. 130 kW) am Ladeort überschritten würde.
Ladesimulation mit Infrastrukturbeschränkung
Hier werden zusätzlich zu den Fahrzeugmodellen die technischen Beschränkungen der Ladeinfrastruktur berücksichtigt:
- max. Ladeleistung je Standort, je Ladestation und je Ladepunkt
- Anzahl verfügbarer Ladepunkte
- Ladepunktbelegung
- Lastverteilungsmechanismen (FCFS, LoadBalancing)
Diese Simulation bildet den Flottenbetrieb deutlich realistischer ab als die Ladesimulation ohne Infrastrukturbeschränkung.
Zentrale Fragestellungen:
- Können alle Fahrzeuge rechtzeitig geladen werden?
- Wann entstehen Flaschenhälse an Ladepunkten?
- Wie wirkt die Ladeverteilung auf die Leistungs- und Lastkurven?
- Wo treten kritische Energiesituationen auf?
| Algorithmus | Verhalten | Beschreibung |
|---|---|---|
| Infra_Greedy_FCFS | volle verfügbare Leistung, Priorisierung: First‑Come‑First‑Served | Fahrzeuge laden maximal, bis die Infrastruktur voll ausgelastet ist; Reihenfolge bestimmt Verfügbarkeit. |
| Infra_Lazy_FCFS | minimale benötigte Ladeleistung, Priorisierung: First‑Come‑First‑Served | Fahrzeuge laden nur so schnell, wie nötig ist, um die nächste Fahrt vollgeladen zu beginnen; Reihenfolge bestimmt Verfügbarkeit. |
| Infra_Greedy_VH2CP | volle Leistung, feste Ladepunktzuordung | Fahrzeuge laden maximal, bis die Infrastruktur voll ausgelastet ist; Fahrzeuge dürfen nur an „ihrem“ Ladepunkt laden, keine dynamische Wahl. |
| Infra_LB | gleichgewichtete Leistungsumverteilung innerhalb eines Ladeortes | Infrastruktur verteilt die Gesamtleistung am Ladeort auf alle gleichzeitig ladenden Fahrzeuge. |
Einsatzszenarien
- Referenzsimulationen
- Modellvalidierung und Kalibrierung
- Prüfung von Infrastrukturengpässen
- Bewertung von Ladepunktkapazitäten
- Planung neuer Ladeorte oder Umbauten
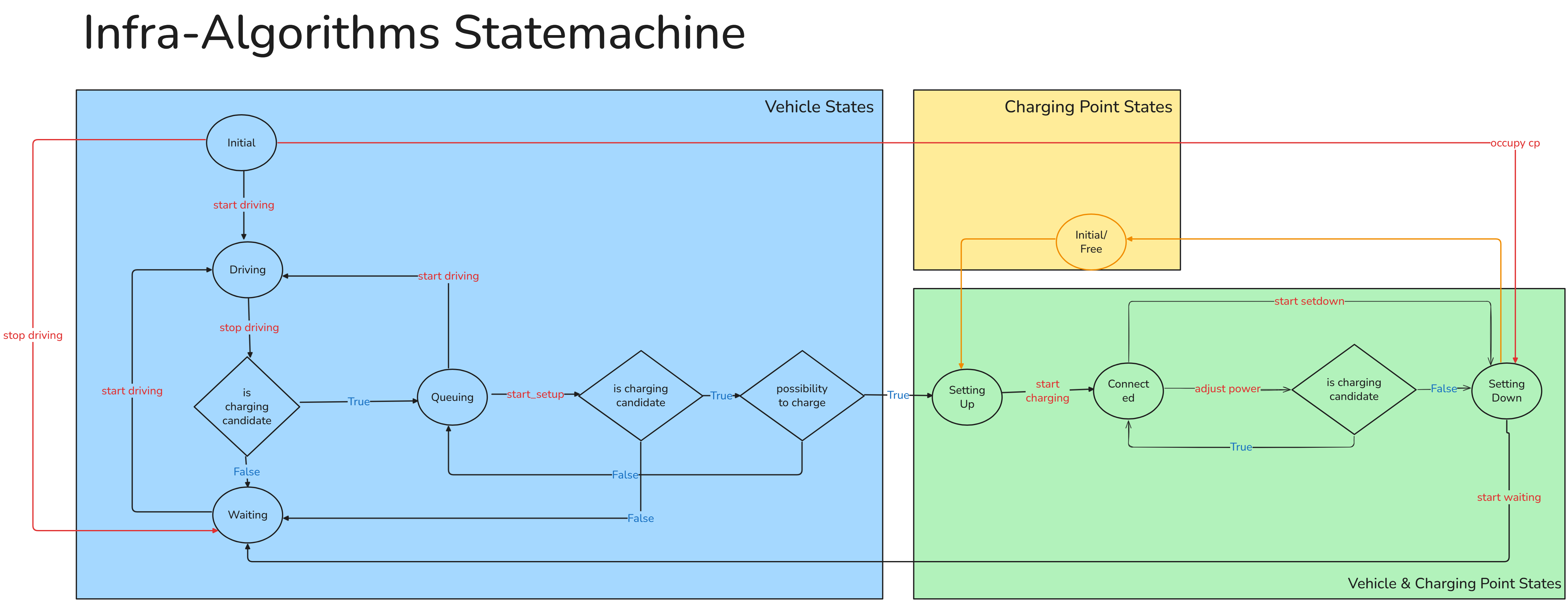
Zustandsmaschine der Infra-Algorithmen
Die Infra-Algorithmen können im Allgemeinen als Zustandsmaschine für Fahrzeuge und Ladepunkt dargestellt werden, d.h. jedes Fahrzeug und jeder Ladepunkt haben zu jedem Zeitpunkt ein bestimmtes Zustand und können nur durch bestimmte Aktionen in ein anderes Zustand versetzt werden. Darüberhinaus ist der Zustand des Fahrzeugs während eines Ladevorgangs (inkl. setup und setdown) mit dem Zustand der verbundenen Ladestation synchron.
Beispiel Analyse
In dieser Beispielhaften Analyse, werden zwei Fahrzeuge (blau und grün) an einem Ladeort mit dem Infra-LB-Algorithmus simuliert.
Analog zur Beispiel Analyse mit Vehicle Greedy-Algorithmus, ist in der folgenden Abbildung an Hand des Batterieladestands zu sehen, dass beide Fahrzeuge ihre Fahrten problemlos meistern und rechtzeitig geladen werden können.
Obwohl die max. Ladeleistung je Fahrzeug 150 kW beträgt, können in den Ladeintervallen nur maximal 130 kW bezogen werden.
Ein Blick auf den aggregierten Lastgang am Ladeort zeigt, dass durch das berücksichtigen der Ladeinfrastruktur-Limits die zulässige Last (max. 130 kW) am Ladeort nicht überschritten wurde. Das bei gleichzeitigen Ladeintervallen die Ladeleistung gleichmäßig verteilt wird (Strategie: Loadbalancing)).
Da jedes Fahrzeug einen Ladepunkt (blau oder grün) zugewiesen werden muss, wird in der folgenden Abbildung die Ladeleistung je Ladepunkt betrachtet. Dabei fällt auf, dass der grüne Ladepunkt kaum benötigt wird.
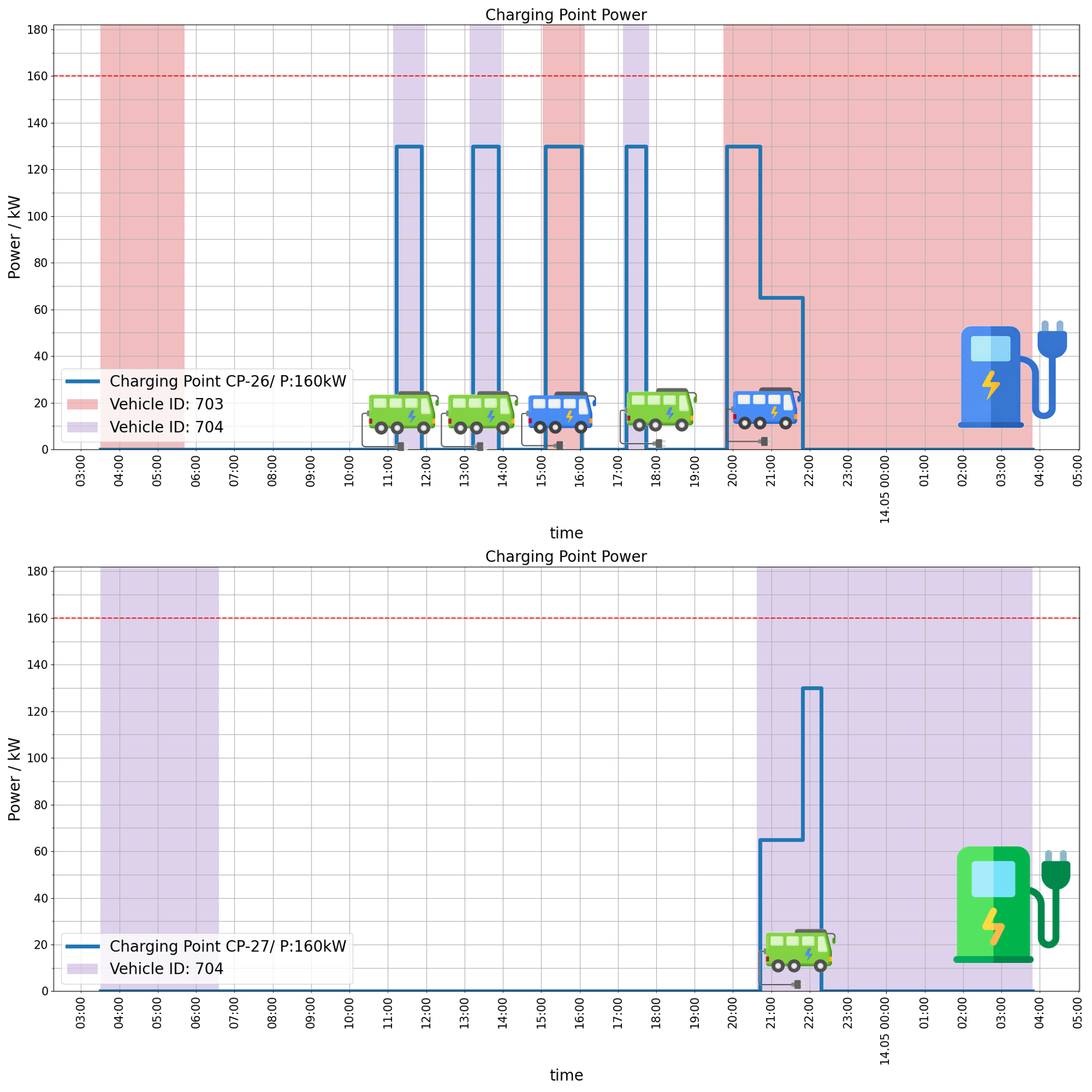
Beispiel Vergleichs-Analyse mit Infra-Lazy-FCFS-Algorithmus
In dieser Analyse werden der Vehicle Greedy-Algorithmus, Infra-LB-Algorithmus und Infra-Lazy-FCFS-Algorithmus für das vorherige Beispiel verglichen.
In der folgenden Abbildung ist ein direkter Vergleich der Batterieladestand zu sehen.
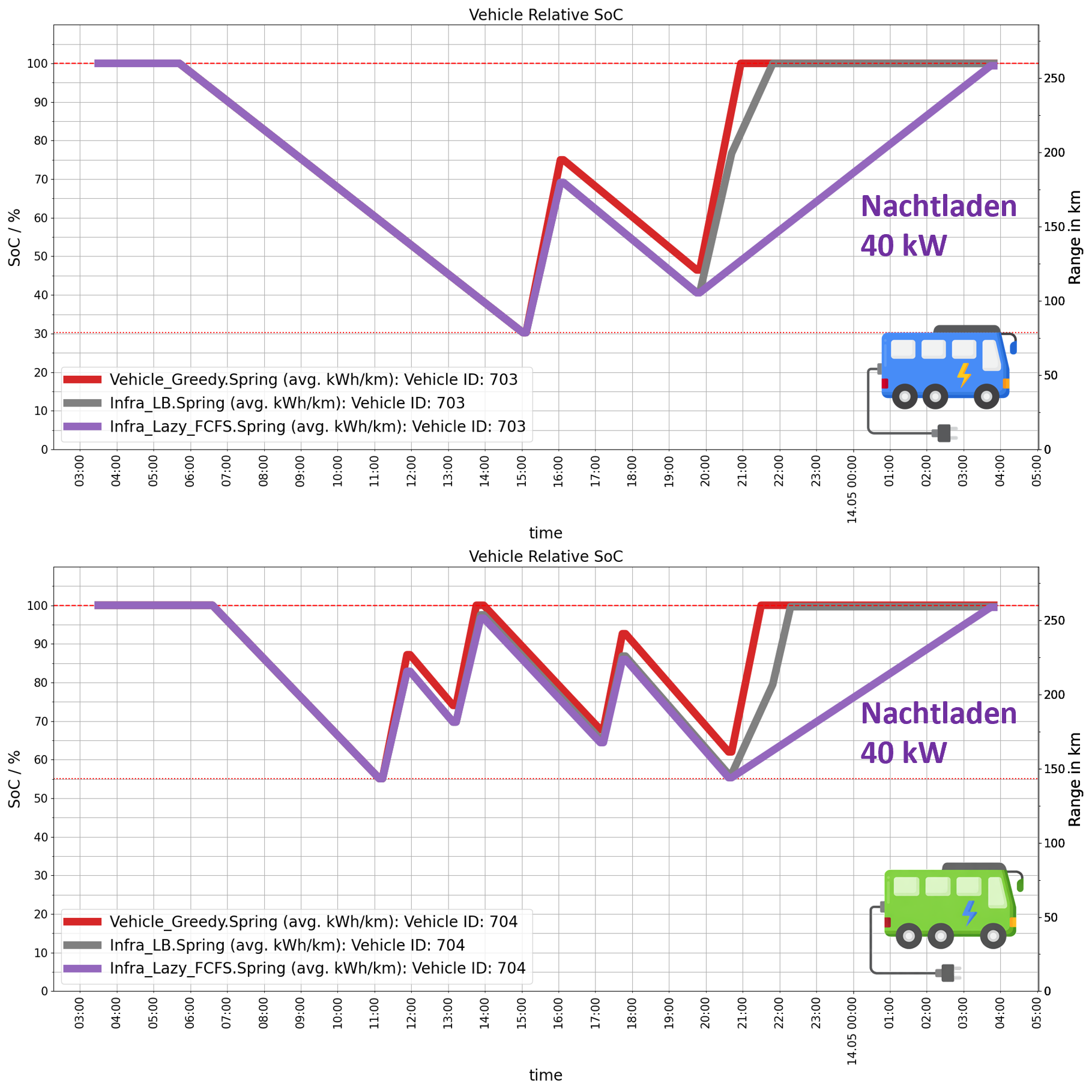
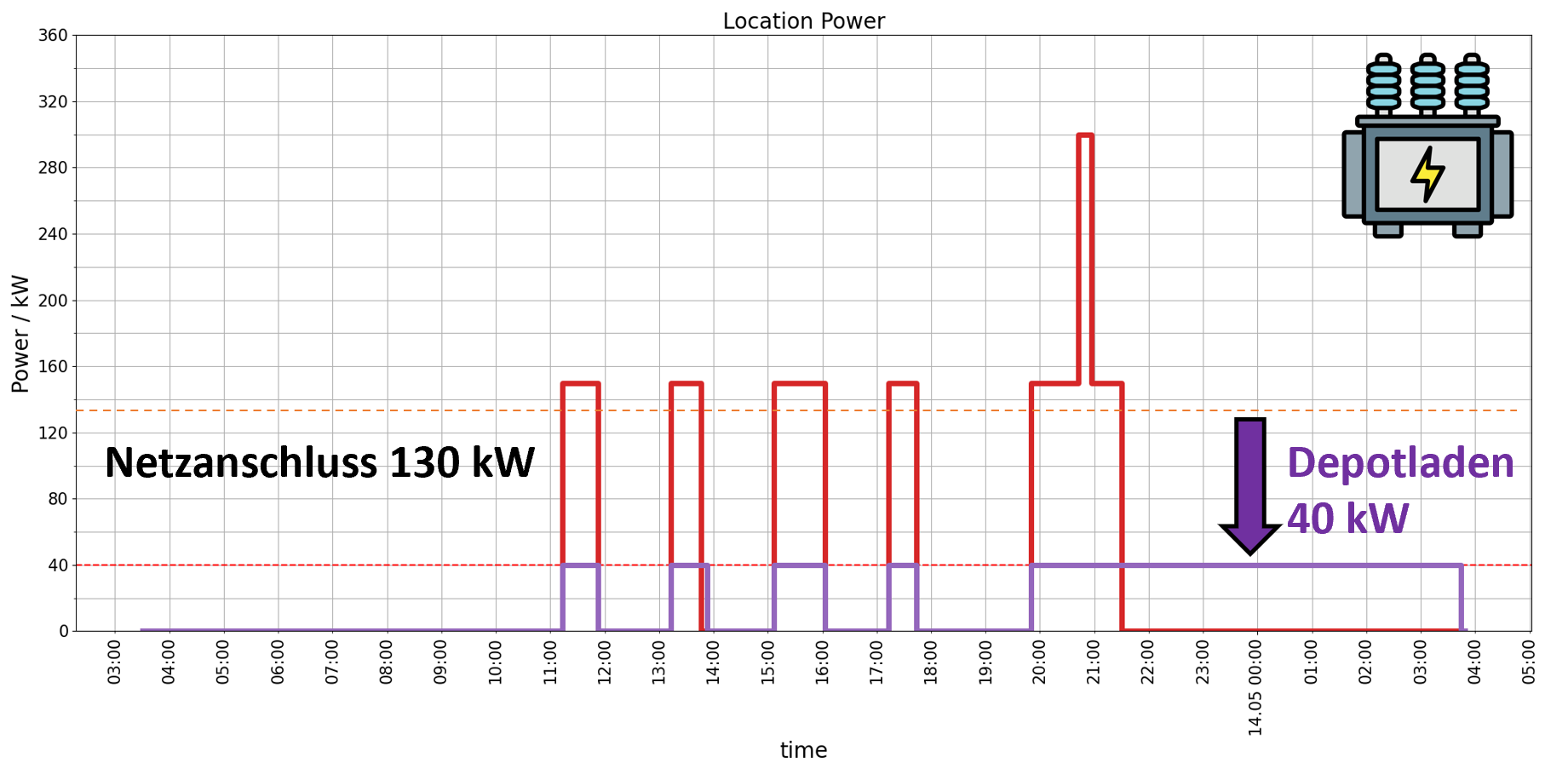
Die da die Fahrzeuge Nachts einige Stunden geladen werden können, sinkt die Ladeleistung beim Infra-Lazy-FCFS-Algorithmus drastisch von den möglichen 130 kW auf 40 kW ab.
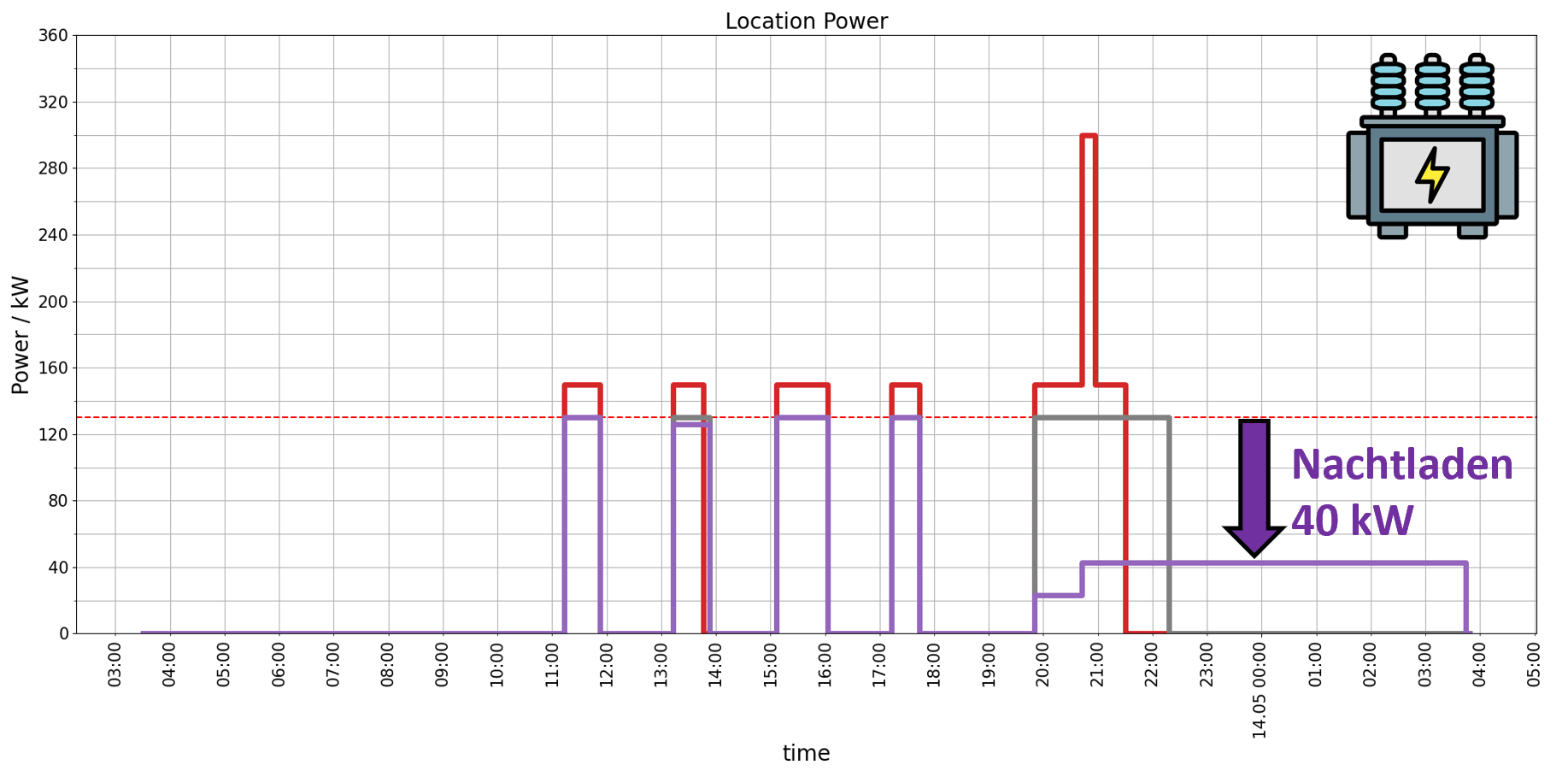
Beispiel Vergleichs-Analyse mit Infra-LB-Algorithmus und 40 kW-Limit
In dieser Analyse werden der Vehicle Greedy-Algorithmus und Infra-LB-Algorithmus für das vorherige Beispiel verglichen, jedoch ist die max. Ladeleistung am Ladeort auf 40 kW begrenzt.
Im direkter Vergleich des Batterieladestand ist zu sehen, dass bei reduzierter Ladeleistung die Fahrzeuge ihre Fahrten nur mehr knapp meistern.
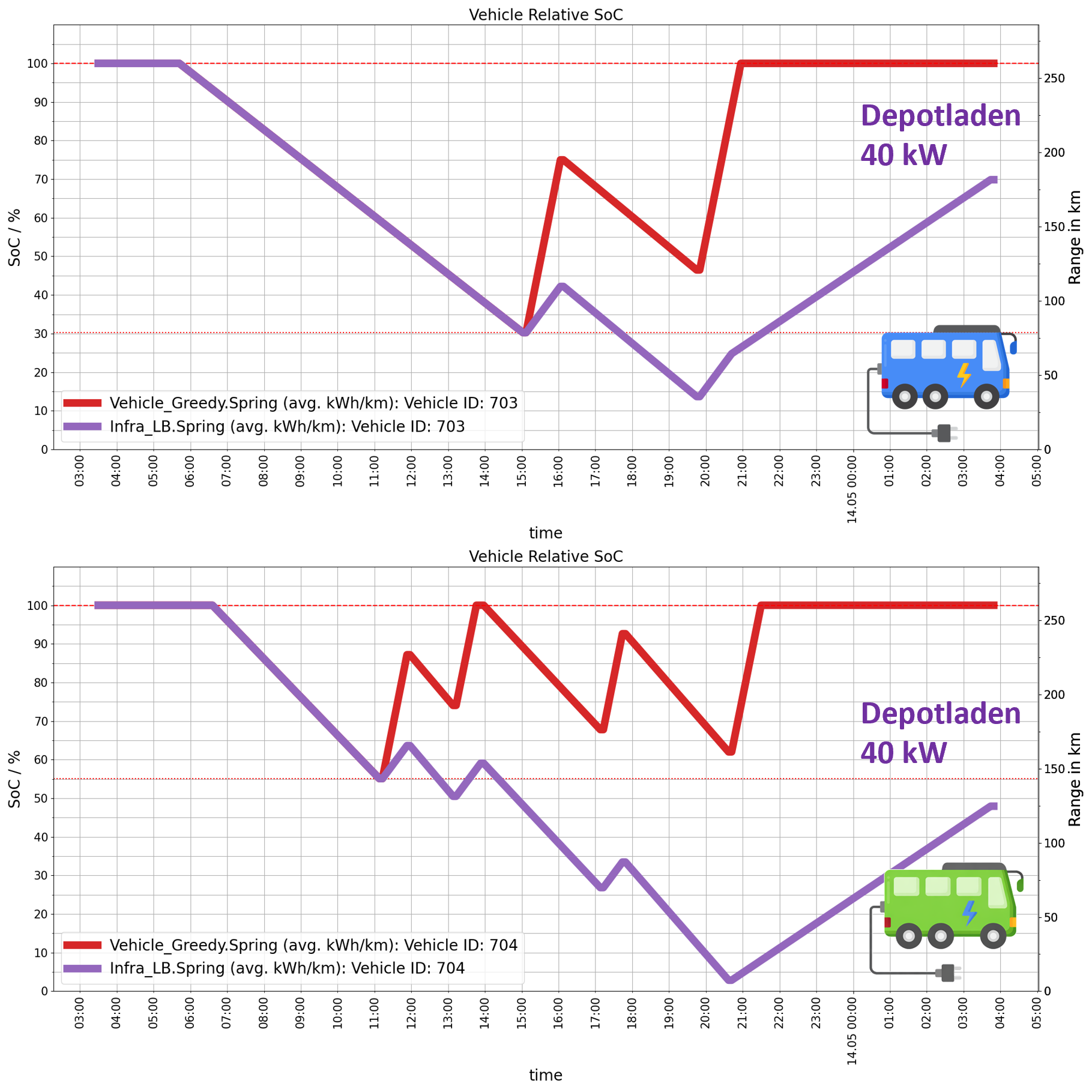
Dennoch zeig sich besonders im direkten Vergleich mit dem Vehicle Greedy-Algorithmus, das der Betrieb auch mit sehr geringer Ladeleistung funktionieren könnte.